These notes are based on lectures given by Professor Mikäel Pichot for MATH 223, Linear Algebra at McGill University during the Winter 2024 semester.
Chapter 1: Vectors in
Complex Numbers
The following are some of the standard sets of numbers.
- Natural numbers:
(for the purposes of this class, ) - Integers:
- Rational numbers:
- Real numbers:
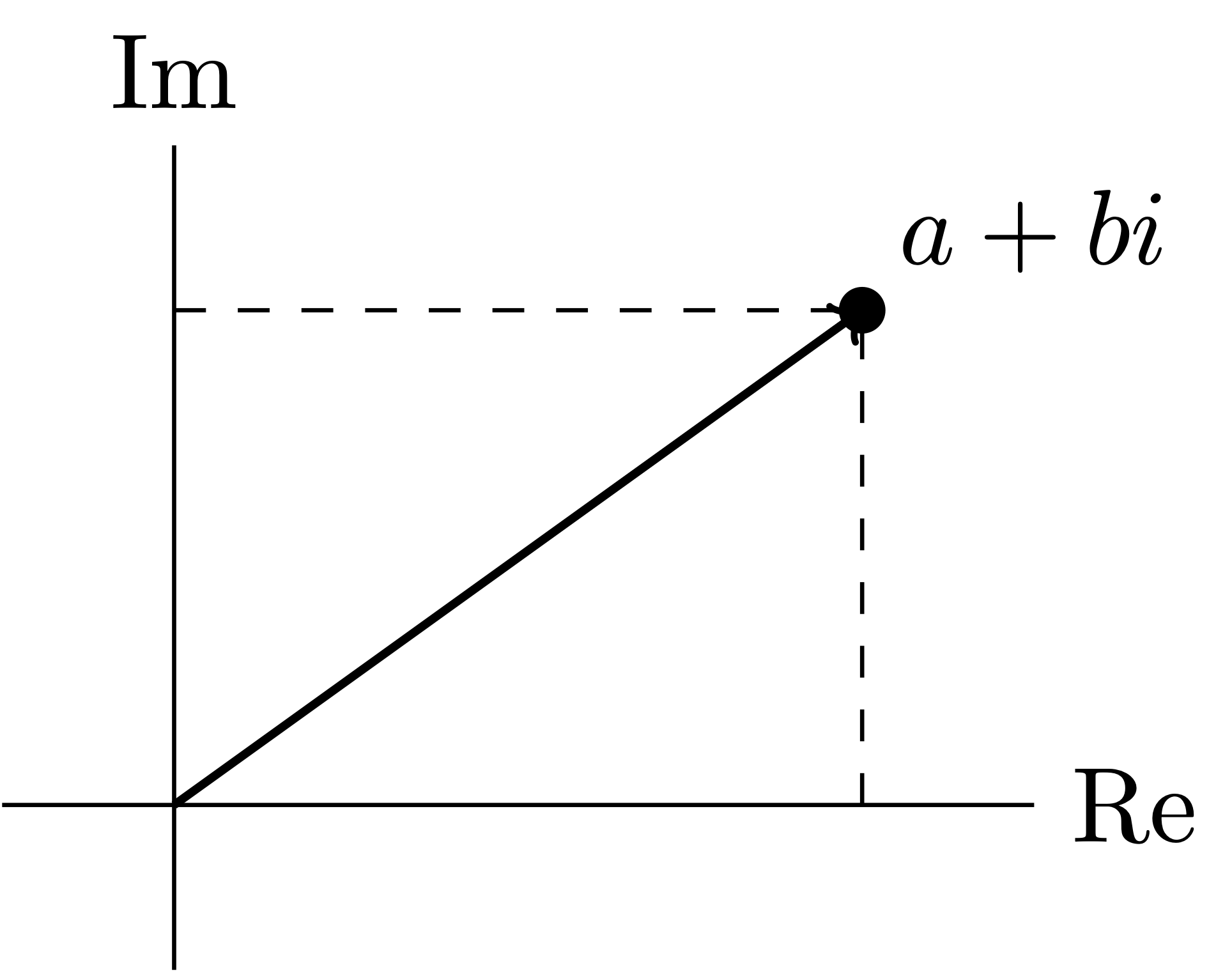
is the set of all numbers on the real number line including both rational and irrational numbers. - Complex numbers:
( is called the real part and is called the imaginary part).
These standard sets can be arranged in increasing order:
Definition (Imaginary Unit)
is the imaginary solution to
Theorem
In
, is not defined.
Unlike real numbers which are represented on a number line, complex numbers are represented on the complex plane where the
Theorem
We need complex numbers in order to be able to solve all non-constant polynomials (
).
Definition (Root/Solution)
A root/solution,
, of a polynomial, , is .
Theorem
Every non-constant polynomial has a solution in
.
Corollary
In
, every polynomial can be factored. Furthermore, by repeated factoring, we can get linear factors which are the roots of the polynomial.
Operations with Complex Numbers
We also want to define operations between
- Equality of Complex Numbers: Two complex numbers
and are considered equal if and only if and . - Addition of Complex Numbers:
- Multiplication of Complex Numbers: To define multiplication, observe the identity
. - Complex Conjugate:
Geometrically, this is represented by a reflection over the real axis of the complex plane - Inverses of Complex Numbers:
Theorem
Corollary
Proof.
First, we prove the forward implication:. Secondly, we prove the converse:
. QED
Theorem
The inverse of a complex number is a complex number.
Proof.
QED
Lemma
Definition (Euclidean Norm/Modulus of a Complex Number)
From the geometric representation of a complex number, we can find the magnitude of the vector using
.
Theorem
Proof.
- Show
- Show
QED
Standard Algebraic Structures
Let
Definition (Multiplicative Inverse)
Given
, we say is an inverse of if . Furthermore, we say that is invertible if such that is an inverse of .
Example: The inverse of
Lemma
If an inverse of
exists, it is unique.
A matrix
A note about notation:
Definition (Ring)
A nonempty set
is a ring if addition and multiplication is defined on the set and respects the following axioms:
- Associativity:
and - Zero element:
- Negative:
- Commutative addition:
- Distributive:
A ring can be called a commutative ring if
Thus,
Definition (Field)
A field is a commutative ring if every nonzero
has a multiplicative inverse (i.e., ).
Thus, although
Fields are the building blocks of vector spaces. In this course, we will focus on fields
Example: Prove that
Proof.
By contradiction, assumeis invertible. Since this is a contradiction,
must be not invertible.
QED
Geometry of Complex Numbers
Since complex numbers can be represented on the complex plane, we can examine the geometry of complex numbers.
Example: A circle of radius
If we look at the unit circle, we can notice the periodicity of
Euler’s Formula
Euler’s formula established a relationship between trigonometric functions and the complex exponential function.
If we observe that
Chapter 2: Algebra of Matrices
A matrix
The element
Matrix Addition and Scalar Multiplication
Matrix Addition is defined as follows:
Matrix Scalar Multiplication is defined as follows:
Matrix Multiplication
Matrix multiplication is defined between a matrix
Matrix multiplication is described by the equation below where the
Given square
Transpose of a Matrix
The transpose of a matrix
Square Matrices
Definition (Square Matrix): A square matrix has the same number of rows and columns (i.e., it is an
Definition (Diagonal): The diagonal of a square matrix are the entries
Definition (Trace): The trace of
Definition (Identity Matrix)
The identity matrix, denoted
is the -square matrix with 1’s in the diagonal and 0’s everywhere else. A unique property is that for any matrix , .
Chapter 4: Vector Spaces
In a vector space
Definition (Vector addition and Scalar Multiplication)
- Vector addition: For any
, we assign a sum . - Scalar multiplication: For any
and , we assign a product .
In addition to defining vector addition and scalar multiplication on a nonempty set, the following axioms must hold for arbitrary vectors
- Associative vector addition:
- Origin/zero vector or neutral element for addition:
- Negative:
- Commutative:
- Distributive scalar:
where - Distributive vector:
where - Associative scalar multiplication:
- Unit scalar:
where
Definition (Vector Space)
A vector space is a nonempty set with vector addition and scalar multiplication defined and respects all of the above axioms.
Examples of Vector Spaces
Space
Given an arbitrary field
In
In
Polynomial Space
Let
The degree of a polynomial refers to the highest power in the polynomial with a nonzero coefficient. Exceptionally, the degree of the zero polynomial is undefined.
Here, vector addition and scalar multiplication can be represented by adding polynomials and multiplying each term of the polynomial by the scalar respectively.
The standard basis of this space is:
The set of all polynomials is denoted
Also, although polynomials have multiplication defined, they are only well defined in
Matrix Space
Multiplication is well defined on square
The standard basis of
Function Space
Vector addition of two functions
Scalar multiplication of a function
The zero vector in
A function in
Kronecker functions
Linear Combinations and Spanning Sets
Definition (Linear Combination)
A vector
is a linear combination of a finite set of vectors if there exists which satisfy .
Example: Express
After solving, we find that
What happens if we get an inconsistent solution? This would suggest that the vector is not in the span of the other vectors and it is linearly independent from them.
Definition (Spanning Set)
If every vector in a vector space
can be expressed as a linear combination of vectors , then we can say . In other words, the span of the set of vectors is the set of all linear combinations those vectors.
The canonical basis vectors can be used to span
The following example illustrates how spans over
Example: Let
This example shows that while
Remark. The properties of spans over fields, like many theorems over fields, do not hold in a generalization to rings. Spans over rings are studied in a different field (pun totally intended) of study and are more involved.
Subspaces
Definition (Subspace)
If
is a subset of a vector space over a field and is a vector space over with respect to the vector addition and scalar multiplication operations on , then is a subspace of .
In order to show that a set
Theorem (Subspace Criterion)
If
is a subset of a known vector space , we can use the subspace criterion to prove that is also a vector space. is subspace of if and only if:
- Zero vector:
- Closed under vector addition:
- Closed under scalar multiplication:
The last two properties can be combined to form the equivalent property which says that the linear combination of
Proposition
There are only 2 subspaces of
itself (where or ). Proof. The subspaces of
are .
is always a subspace and it is the smallest subspace since all vector spaces contain the zero vector. This also means that we cannot have an empty subspace.
is also obviously a subspace since and is a vector space. Now, we prove that there is no other subset of
. Let be a subspace of . We know that or . We need to show that if . Let
s.t. .
which means that the other subset must be all of .
Spanning sets can be shown to be subspaces. The proof by the subspace criterion is quite trivial since it is analogous to linear combinations. However, it shows that for any subspace we can find a set of vectors which spans it.
Proposition
The
is a subspace of . This can be trivially proven by the subspace criterion.
Intersections, sums, and direct sums
Let
Intersections
Proposition
The intersection
is a subspace. Proof.
Let, (a) Closed under vector addition
and > > and Since
is a subspace, .
Sinceis a subspace,
Therefore,. (b) Closed under scalar multiplication
Sinceand are subspaces, they are closed under scalar multiplication so and .
Therefore,. QED
Unions
Proposition
The union
is a subspace if and only if or . Proof.
(a) Forward implication
Assumeis a subspace.
For proof by contradiction, assumeand .
.
Sinceand , . This violates the subspace criterion which is a contradiction. (b) Converse
Ifthen .
Ifthen .
Sinceand are both subspaces, in all cases, is a subspace. QED
Sums
Proposition
The sum
is a subspace. Proof.
Let, , and . Then, . (a) Closed under vector addition
> > and > > (b) Closed under scalar multiplication
> > and since and are closed under scalar multiplication.
QED
Corollary
Proof.
(a)
Supposeand . Then, .
By definition, the vectoris a linear combination of a vector from and a vector from so it is in . (b)
Let. By definition, where , and .
and , so QED
Direct Sums
Definition (Direct Sum)
A sum
is a direction sum, denoted , if .
Proposition
and are in direct sum a non-zero vector has a unique decomposition (i.e., and are unique). Proof.
(a) Forwards implication
Ifand are in direct sum, then .
Assume for contradictionwhere and .
> > > > and
Therefore,which only contains the zero vector, so . This is a contradiction. (b) Converse
A non-zero vector has a unique decompositionand are in direct sum.
Contrapositive:and are not in direct sum does not have a unique decomposition.
and are not in direct sum means .
So, we can rewriteas and since and , this is a different but still a valid decomposition of . QED
How to span a vector space
Building a spanning set
We can inductively build a spanning set of a vector space. Let
Base case: the smallest possible vector space is
Inductive step: If
As long as
This iterative process only halts after
Dimension
Definition (Finite Dimensional Space)
A vector space
is finite dimensional if it can be spanned by finitely many vectors. (i.e., such that ). If it cannot be spanned by finitely many vectors, it is infinite dimensional.
Definition (Dimension)
is the smallest number of vectors that span . Special cases, if , then and if is infinite dimensional, then .
Example:
Example: Show that
Proof.
For contradiction, assume
is spanned by finitely many polynomials: . There exists one polynomial in this set that has the highest degree. Let that polynomial be with . Then all polynomials with degree greater than cannot be in the span of these polynomials since vector addition and scalar multiplication as defined on polynomials does not increase the max degree. Therefore, must be infinite dimensional. QED
Linear Independence
Definition (Linear Independence)
A set of vectors
are linearly independent if where
.
Given vectors
Definition (Linear Dependence)
Naturally, a set of vectors are linearly dependent if they are not linearly independent. i.e.,
Proposition
A set of vectors
are linearly dependent if and only if there exists one of the vectors is in the span of the rest of the vectors.
Proposition
If the determinant of an upper triangular matrix (computed by multiplying the entries along the diagonal) is zero if and only if the columns of the matrix are linearly dependent.
Main Basis Theorem
Definition (Basis)
The basis of a vector space
is a set of vectors that are linearly independent and a spanning set of .
Although the notions of spanning sets and linearly independent sets doesn’t really care about the ordering of the vectors, it is often helpful to express a basis as a tuple so that the basis vectors can be used for a coordinate system.
Lemma
The number of vectors in the basis of
is equal to . Proof.
Let
be a basis of .
Since the set is linearly independent,.
Since the set is spanning,.
Putting this together,. QED
Of course, this means that given two bases
, then .
Often when we want to determine if a set of vectors forms a basis of a vector space, the number of vectors is equal to the dimension. If it is not, we can immediately determine that it is not due to the previous Lemma (if there are fewer vectors it won’t be a spanning set while if there are more vectors it won’t be a linearly independent set). However, when the number of vectors matches the dimension, it is redundant to check both spanning and linear independence, since they imply each other.
Proof.
Given
. If
is spanning, then it must also be minimally spanning since any fewer vectors cannot span all of .
Ifis linearly independent, it must also be maximally linearly independent since any more vectors in will be in .
Thus, if either condition is met, thenis a basis.
In practice, it is often easier to prove linearly independent rather than spanning.
Theorem (Basis Theorem)
A basis is the minimal spanning set and the maximal linearly independent set. (n.b., although this does not imply bases are unique, it does imply that all bases of the same vector space have the same cardinality).
It is also often helpful to have a standard basis for vectors spaces. The standard bases and their respective dimensions are:
- Space
(dimension )
- Space
(dimension )
- Space
(dimension )
- Space
where is finite (dimension )
Coordinates
Theorem (Basis-Coordinates)
is a basis of if and only if every vector can be expressed as a unique linear combination of the basis vectors. Proof.
(a) Forwards implication
It is trivial to prove that
can be expressed as a linear combination of the basis vectors since the basis vectors are a spanning set of . We will prove uniqueness by contradiction. Assume for contradiction, that there are two coordinates
and .
So,.
By subtraction, we find that. Since is linearly independent, and so . This is shows that the two coordinates must have been identical to begin with thus proving uniqueness. (Note the connection with the proof of unique decomposition for ) (b) Converse
Once again, it is trivial to show that if every
as unique coordinates, then is a spanning set of . To prove linear independence, we need to show that the only solution to
is the trivial solution. And, indeed it is, because vectors have unique coordinates, . Thus, we have shows that is also linearly independent. Since
is both a spanning set of and linearly independent, it is a basis of . QED
Example: Consider the standard basis
It can be expressed as the following sum:
To find the coordinates of a vector in an alternative basis, solve the following linear system:
Example: Let
Finding a basis
Basis Algorithm
Let
. The basis algorithm can be used to get a basis of .
Define matrix
where the rows correspond to the vectors. Use Gaussian Elimination to get Row Echelon Form, matrix
. The non-zero rows in
form a basis of . Proof of correctness.
The elementary row operations do not affect the row space of the matrix, it is an invariant (row space is the span of the row vectors).
When we get to an REF, the vectors are linearly independent.
So the non-zero vectors inare linearly independent and still form a spanning set of . This is the definition of a basis of .
More Basis Theorems
Theorem (Transfer theorem)
If
is a spanning set of and is a linearly independent set in , then both and and are bases of .
Theorem (Basis extraction theorem)
If
, then some subset forms a basis of .
Casting-Out Algorithm
We can use the basis extraction theorem to actually extract a basis from a spanning set.
Like the basis algorithm, let. The casting-out algorithm will extract a basis of from .
Define matrix
where the columns correspond to the vectors. Use Gaussian Elimination to get Row Echelon Form, matrix
. The original vectors corresponding to the columns with the pivots in
for a basis of . Proof of correctness.
The linear dependency relations between columns are preserved by elementary operations.
Theorem (Basis extension theorem)
Given a linearly independent set
in . There exists in such that forms a basis of .
Corollary
If
is a subspace of , then .
Corollary
If
is a subspace of , there exists a subspace called a supplement of such that . Note that supplements are not unique. Example, in
, all lines not on a plane are valid supplements. The supplement are the vectors added in the Basis Extension Theorem.
Theorem (Basis juxtaposition theorem)
Suppose that
and are two subspaces in direct sum (i.e., ). Let be a basis of and be a basis of . Then, is a basis of .
Corollary
Chapter 5 and 6: Linear Mappings and Matrices
A platter of definitions
Definition (Transformation)
A transformation (also referred to as map or function)
takes an element and assigns a value , denoted . The set is called the domain and the set is called the co-domain of .
Definition (Injective)
A transformation
is injective if . The equivalent contrapositive is . Connection to calculus: the horizontal line test.
Definition (Surjective)
A transformation
is surjective if . Connection to calculus: range of the function is the codomain.
Definition (Bijective)
A transformation is bijective if it is both injective and surjective.
Definition (Invertible)
A transformation
is invertible if there exists such that and .
Lemma
Let
and be transformations.
Proof.
We assume
but for contradiction assume not injective or not surjective. If
not injective, where such that .
Then applyto both sides to get .
Since, which is a contradiction and so must be injective. If
not surjective, such that . Let . Then which is a contraction and so must be surjective. Therefore, in all cases,
is injective and is surjective so the original statement is proven.
Theorem
A transformation
is bijective if and only if it is invertible. Proof.
We observeimplies injective and surjective
and thatimplies injective and surjective.
Therefore, bothand are injective and surjective so both are bijective.
Definition (Composition)
Let
and be transformations. Then, define as the composition of and . To use the mapping, first apply to an element in to get an element in . Then, the element in can be mapped to an element in by . Overall, it can be expressed as .
Definition (Linear Transformation)
A transformation is linear if
preserves addition: , and preserves scalar multiplication
We also not that if
Definition (Isomorphism)
T is an isomorphism if it is linear and bijective.
Example: Show that if
Proof.
(a) Preserves addition
(b) Preserves scalar multiplication
Example: Show that if
Proof.
(a)
is linear See previous example.
(b)
is bijective Let
and . Since
is injective, .
Furthermore, sinceis also injective, .
Therefore,is injective. Since
is surjective, .
Furthermore, sinceis also surjective, . We can use the surjectivity of to argue that we can get to any .
Therefore, overallis surjective.
is injective and surjective, so it is bijective.
Example: Prove that if
Proof.
(a) Proof of bijectivity
Since
is invertible, it is bijective. (b) Proof of linearity
(b-i) Preserves addition
Let. Then, such that . Therefore,
. By the linearity of
, . Then, by the injectivity of
, . Thus,
and so preserves addition. (b-ii) Preserves scalar multiplication
Let. Then, such that and . Therefore,
and . By linearly of
, . By injectivity of
, . Thus,
and so preserves scalar multiplication. Therefore,
is linear and so is an isomorphism.
Example: Show that a linear transformation is associated with a matrix.
Proof of linearity.
Definiton (Linear Operators)
An operator
on is a linear transformation where the domain equals the codomain. The fact that
is an operator means it can be iterated. We use the notation to denote the map . The iterated vectors
form an orbit of under the transformation .
Scaling Transformation
Of course, I had to include the incredible fish scaling diagram from the notes.
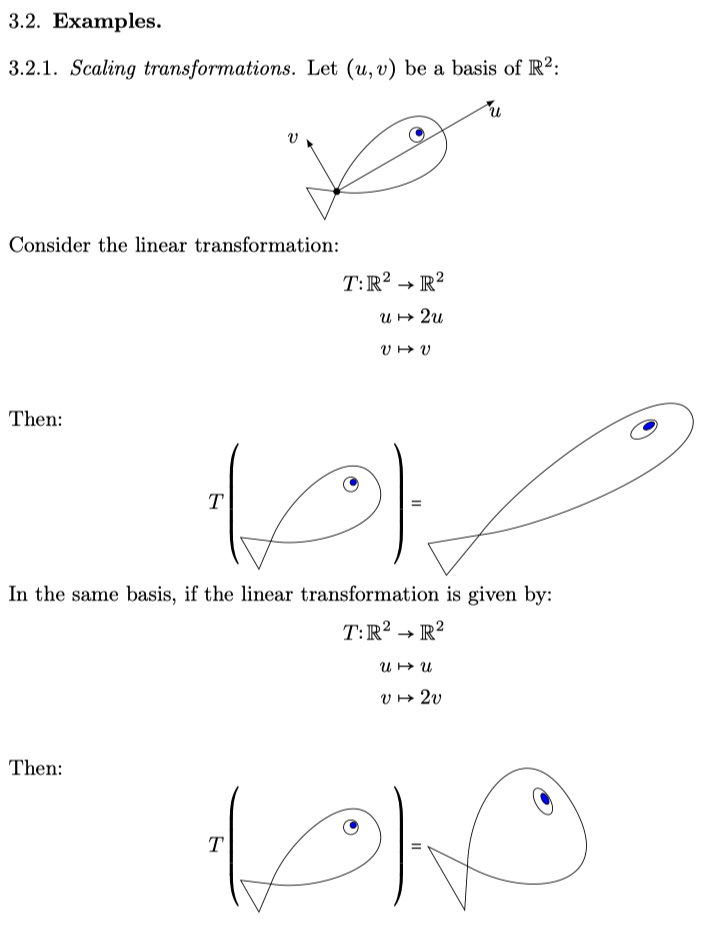
Definition (Scaling Transformation)
A linear transformation
is a scaling transformation if there exists a basis of and scalars such that . Note: later, we see that these transformations are formally called diagonalizable.
In scaling transformations, if
Linear Map
Proposition
Let
be a basis of and let . Then,
Example: The derivative of polynomials is a linear transformation.
It is defined on its standard basis as
Proof of linearity.
(a) Preserves addition:
(b) Preserves scalar multiplication
The
Example: The integral/anti-derivative is a linear transformation.
It is defined on its standard basis as
Proof of linearity.
(a) Preserves addition:
(b) Preserves scalar multiplication
Example: Notice that
Remark: The point of this section is to point out that it is only possible to have linear operators to be exclusively injective or surjective (i.e., XOR, not both) in infinite dimensional spaces such as
In other words, in finite dimensional spaces,
Projections
Definition (Projections)
A projection is a scaling transformation where all basis vectors are scaled by 0 or 1.
More formally, letbe a vector space with a direct sum decomposition.
Then, everyhas a unique decomposition .
So, the projection ontoalong is defined as So,
.
Proposition
Projections are linear transformation
Proof.
(a) Preserves addition
Let.
and . Since
and , we have .
So, projections preserve addition.(b) Preserves scalar multiplication
Letand .
Then,. Therefore, projections preserve scalar multiplication.
Thus, projections are linear.
QED
Kernel and Image
Definition (Image)
The image (a.k.a. range) of
is a subspace of the codomain and includes all vectors that have a corresponding vector in the domain.
Definition (Kernel)
The kernel (a.k.a. null space) of
is a subspace of the domain where .
Proposition
surjective Proof.
The definition of surjectivity,
means that every is also so .
By the definition of image,.
So, in a surjective transformation,.
Proposition
injective Proof.
(a) Show that
injective (a-i) Show that
. Trivial since kernel is a subspace.
(a-ii) Show that
. We know that
For contradiction, suppose there was another nonzero vector.
This is a contradiction sincebut violating injectivity.
Therefore,. (b) Show that
injective Let
such that .
Then,.
Since, .
Therefore,is injective.
Proposition (Homogeneous linear systems)
Let
be a the matrix associated with the following linear transformation: Then,
In other words, finding a basis of
is algorithmically equivalent to for the solution set to a homogeneous system.
Proposition
Let
be a vector space with basis and be a linear transformation. Then, the . Proof.
(a)
Let. So, such that .
By taking coordinates,.
Then,(b)
This is more or less the reverse of part (a).
Theorem (Rank-nullity)
Let
be a linear transformation from vector space to , both finite dimensional. Then,
Matrix of a linear transformation
Proposition
Every linear transformation
has an matrix in basis where the -th column of correspond to . Furthermore, to generalize to
, where is the basis for and is the basis for . Then, the matrix is rows and columns.
Example: Determine the matrix of
Example: Determine the matrix of a rotation
Definition (Composition)
If
is a linear operator, the notation refers to -fold composition:
Main Isomorphism Theorem
The definition of isomorphism was previously introduced. Here we use some new notation to further explore isomorphism.
Let
Since
Furthermore, we say that
Theorem (Main isomorphism theorem)
Let
be a vector space of dimension over a field .
Remark: Isomorphisms are very handy since we can solve many problems easily in
Remark: Furthermore, to check if two spaces over a field
Theorem
Let
Then,
is an isomorphism if and only if is a basis of . Proof.
(a)
surjective Firstly, we show
surjective
surjective means that , . Therefore, and so .
Obviously,since the vectors are all in . Secondly, we show that
surjective.
Since, , we can express it as the sum for some values of ‘s. Then, . Since , we have found the corresponding such that , is surjective. Therefore, the surjectivity if and only if spanning.
Another way to prove.
Letbe the standard basis of . We also observe that since that standard basis of is 0 in all but the -th entry which picks out the .
surjective . (b)
injective is linearly independent.
injective .
So,.
Therefore,.
Therefore,is linearly independent.
Proposition
Let
be an isomorphism and be vectors in . Then, . Intuitively, it turns out that
preserves linear relationships.
are linearly independent in are linearly independent in is a basis of is a basis of
Rank Theorems
Corollary
If
is a linear operator, the is an isomorphism, is injective and is surjective are equivalent. It is obvious that isomorphism implies both injectivity and surjectivity by the definition of isomorphism.
Proof that injectivity implies surjectivity and isomorphism.
injective implies and .
By rank-nullity theorem,.
Since, .
Therefore,is surjective and furthermore is an isomorphism. Proof that surjectivity implies injectivity and isomorphism.
surjective implies and .
By rank-nullity theorem,so .
Therefore,which implies injectivity and by extension isomorphism.
We know that
Definition (Rank)
Let
be a matrix. The rank of , denoted is the dimension of the column space which we determine by counting the number of pivots in the REF.
Theorem (Rank-transpose)
The implication being that the column space and the row space of
are equal which makes intuitive sense since they are the same pivots.
Change of Coordinates
Definition (Change of Basis Matrix)
Let
be a vector space.
Then, defineas a basis of and be linearly independent vectors in .
is the change of basis matrix from -coordinates to -coordinates.
To get an intuition for why
Proposition
Let
and be bases of . Define to be the change of basis matrix from
to -coordinates and to be the change of basis matrix from
to -coordinates. Then,
. Furthermore, in this case, the change of basis matrix is always invertible. Intuitively, this makes sense. If we take a vector in
-coordinates, change it to -coordinates and then change it back to -coordinates, it would be a surprise if we didn’t get back the original vector. Therefore, intuitively, . Proof.
Let
and be a basis of . We will also use an arbitrary vector . Firstly, we can define the following isomorphism
By definition, the coordinates of
in the -coordinates is . Secondly, we can define another isomorphism
Again, by definition, the coordinates of
in the -coordinates is Therefore, the change of basis matrix from
-coordinates to -coordinates, , can be decomposed as going from -coordinates to using and then going from to -coordinates using . We can do a similar decomposition of change of basis from
to -coordinates, . To show
Remark (review from Math 133): Finding the inverse of matrices may be helpful. To do so, augment the matrix with the identity matrix and use Gaussian elimination to get RREF on the left side. The right side will be the inverse.
Definition (Change of Basis for a Linear Transformation)
Let
be linear. Then, is the matrix of where is the basis of and is the basis of . If we instead use a linear operator with both
and being a basis of , then we get
Theorem (Change of basis formula)
Let
, and . and are both bases of . Let denote the change of basis matrix from to coordinates and denote the change of basis matrix from to coordinates. These are related by the following formula: Proof.
Since
and , we can rearrange and get
This formula can be deduced intuitively. On the left-hand-side,
Chapter 9: Diagonalization, Eigenvalues and Eigenvectors
Eigenvalues and Eigenvectors
Definition (Eigenvalue)
Let
be a linear transformation. A scalar is an eigenvalue of if such that . The equation
means that and are collinear and scales by .
Definition (Eigenvector)
Given an eigenvalue
for a linear transformation , a vector such that is called an eigenvector.
Definition (Eigenspace)
Let
. The set of eigenvectors for a given is called the eigenspace of corresponding to the eigenvalue .
Proposition
Given
.
Ifis not an eigenvalue, then .
If, then .
Proposition
The eigenspace is a subspace of
.
Proposition
If
, then . Proof.
Let
.
Since, .
Since, . Therefore,
. Since , and so . Thus,
and the inclusion going the other way is obvious since the intersection of subspaces is a subspace so it must contain the zero vector. QED
Corollary
is scaling if and only if basis of eigenvectors if and only if such that .
Two examples of linear transformation that are not scaling are rotations and shearing. For rotations, the exceptions are when
Proposition
Let
be the matrix associated with a linear transformation . Then,
is a scaling transformation is diagonalizable. Proof.
Letbe a basis of eigenvectors of (i.e., the ‘s are eigenvectors and they form a basis). This is possible by definition of scaling.
To write, we compute in the -coordinates. Since (and using the -coordinates of the where all zero except the corresponding entry with one), we get Let
be the diagonal matrix. Then, we use the change of basis matrices between and -coordinates for and .
Then overall, we get.
How to diagonalize
Let
- Find the eigenvalues
of . - Find the eigenspaces for each
.
which can be solved by the homogeneous system
Definition (Geometric multiplicity)
Let
. Then is the geometric multiplicity of eigenvalue
for matrix .
Proposition
is diagonalizable
Corollary
If we have
distinct eigenvalues, then is always diagonalizable since the minimum is 1 for any eigenvalue.
Theorem
The eigenvalues of
are the roots of the characteristic polynomial If we use polynomial factorization to get the following form
where the eigenvalues
‘s are pairwise distinct, then is diagonalizable.
Remark: By the fundamental theorem of algebra, we know that it is always possible to factorize over the field
Summary: Given
Polynomials of matrices
Definition (Powers of Matrices)
Let
.
Theorem
Suppose
is diagonalizable. Then, is also diagonalizable.
The powers of diagonal matrices are easy to compute since each entry is just raised to the
This can be generalized to apply to polynomials of matrices.
Then, for the diagonal matrix, just apply
Theorem (Cayley-Hamilton)
For an arbitrary square matrix
, the characteristic polynomial satisfies .