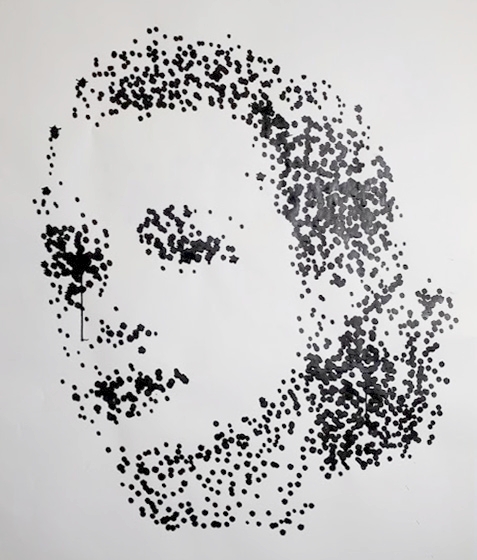
We describe a method for creating stippled prints using a quadrotor flying robot. At a low level, we use motion capture to measure the position of the robot and the canvas, and a robust control algorithm to command the robot to fly to different stipple positions to make contact with the canvas using an ink soaked sponge. We describe a collection of important details and challenges that must be addressed for successful control in our implementation, including robot model estimation, Kalman filtering for state estimation, latency between motion capture and control, radio communication interference, and control parameter tuning. We use a centroidal Voronoi diagram to generate stipple drawings, and compute a greedy approximation of the traveling salesman problem to draw as many stipples per flight as possible, while accounting for desired stipple size and dynamically adjusting future stipples based on past errors. An exponential function models the natural decay of stipple sizes as ink is used in a flight. We evaluate our dynamic adjustment of stipple locations with synthetic experiments. Stipples per second and variance of stipple placement are presented to evaluate our physical prints and robot control performance.
@inproceedings{Galea2016,
author = {B. Galea and E. Kia and N. Aird and P. G. Kry},
title = {Stippling with aerial robots},
booktitle={Computational Aesthetics (Expressive 2016)},
pages={10 pages},
year={2016},
}