308-360 Tutorial #3
General Dijkstra Information
DijkstraĻs algorithm solves the single-source shortest-paths problem on a weighted, directed graph (digraph) G = (V, E) for the case in which all edge weights are nonnegative. DijkstraĻs algorithm works by determining the shortest path weights from sink to vertex v. The shortest path weight of v, from s to v is d( s, v ). Note that d( s, v ) is not the length of the path, but the sum of the weights of edges along the shortest path.
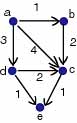
So, paths p1=< a, b, c, e > and p2=< a, d, c, e > are both length 4 and but the weight of p1 = w( a, b ) + w( b, c ) + w( c, e ) = 1 + 2 + 1 = 4 and weight of p2 = w( a, d ) + w( d, c ) + w( c, e ) = 3 + 2 + 1 = 5.
Just like in shortest common subsequence and other dynamic programming algorithms, the shortest path < s, v1, v2, ... , vk-1, v > contains a shortest weight path from s to vk-1, so d(s, v ) = d( s, vk-1 ) + w( vk-1, v ). So, build shortest weight paths by extending smaller shortest weight paths.
example: Find d( a, c ). Look at all shortest weight paths from a to vertices with an arc to c. Vertices a, b and d have an arc to c. d( a, a ) = 0, d( a, b ) = 1 and d( a, d ) = 3. d( a, c ) = minimum( d( a, a ) + w( a, c ), d( a, b ) + w( b, c ), d( a, d ) + w( d, c ) = minimum( 4, 3, 5 ) = 3. The minimum weight path from a to c, d( a, c ) = 3 and d( a, c ) = d( a, b ) + w( b, c ). Note that the minimum length path from a to c is < a, c > with length 1.
Tutorial Question 1
1. How can Dijsktra's algorithm be modified to give a shortest path tree
(equivalent to the breadth first tree)?
The values of the shortest weight paths returned by DijsktraĻs algorithm are the sum of the weights of the edges along the path. If each edge were weighted with 1, then the shortest weight path would be adding 1 to the total weight from each edge of the path, which is equal to 1 x length of path. So, the shortest weight path from s to v when all weights are zero will be the shortest length path from s to v.
Modification to DijkstraĻs algorithm as shown on slide 4 of Notes8 is to line 8.
original 8: d[s, v] = min{ d[s, v], d[s, u] + w(u, v)}
modified 8: d[s, v] = min{ d[s, v], d[s, u] + 1}
To return a shortest path tree, it is necessary to calculate the parent vertex of every vertex. Initialize pi(v) = null for all v in V. Every time the value of d[s, v] is updated with d[s, u] + w(u, v), set pi(v) = u. Vertex u is therefore the k-1th vertex of the k length shortest weight path from s to v.
DijkstraĻs algorithm is like BFS in that set S corresponds to the set of black vertices in a BFS because black vertices in BFS have their correct breadth-first distances and vertices in S have their final shortest-path weights.
Tutorial Question 2
2. Apply Dijkstra's algorithm to digraph pictured in the tutorial. Identify the edges
in the shortest paths tree. S is the set containing all vertices whose shortest weigh path has already been determined.
Stepping through Dijkstra for G = ( V, E ). Each vertex v in V has a shortest weight path value d[s, v].
1. Set d[s, v] = infinity, and d[s, s] = 0.
2. Let Q = V, and now do the following until Q is empty.
3. u = minimal d[s, v] for all v in Q.
4. For each vertex v adjacent to u ( i.e. for each vertex u points to ), set d[s, v] = min{ d[s, v], d[s, u] + w(u, v)}
5. Add vertex u to S.
5. Remove vertex u from Q because we have found its shortest weight path.
To understand this, make a table:
vertex | d( s, v ) | membership | adj( v ) |
Vertex vĻs membership identifies if vĻs minimum weight path has been determined with respect to the entire graph. For the alg, this would be in Q or not in Q. Simply fill in the table as you step through the algorithm. It is useful to make a table for each iteration and then examine the changes in the table values from one iteration to the next.
Tutorial Question 3
3. Apply Bellman-Ford's algorithm to the following digraph. At each pass
through the main loop, record the value d[s, u] computed for each vertex.
The Bellman-Ford algorithms solves the single-source shortext-paths problem in the more general case in which edge weihts can be negative. As with question 2, create a table for each iteration and fill in the elements of the tables. Verify that the last iterationĻs table contains the correct answer.
Dijkstra:
2. Let Q = V, and now do the following until Q is empty. ( for all vertices of V )
3. u = minimal d[s, v] for all v in Q.
4. For each vertex v adjacent to u ( i.e. for each vertex u points to: ( u, v ) ), set d[s, v] = min{ d[s, v], d[s, u] + w(u, v)}
BellmanFord ( corresponding lines number as in Dijkstra )
2. For |V| - 1 vertices do the following ( for all but one vertices of V )
3. { is not in BellmanFord }
4. For each vertex v adjacent to each vertex u ( i.e. for each vertex u points to: ( u, v ) ), set d[s, v] = min{ d[s, v], d[s, u] + w(u, v)}
Tutorial Question 4
4. Construct a digraph without negative weight cycles for which Dijkstra's
algorithm does not work.
CHANGED!!!!
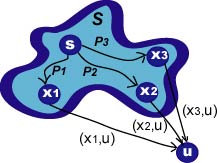
DijkstraĻs algorithm produces incorrect answers for a directed graph with negative-weight edges. this is shown is the proof of Theorem 25.10 in Cormen. The contradiction in this proof relies on the fact that d( s, y ) <= d( s, u ) when path p from s to u can be decomposed as
< p( s to x ), ( x, y ), p( y to u ). Note that s and x are in S, and s can equal x, and y and u are in V-S and y can equal u. Since all d( s, v ) are positive, because all weights are non negative, d( s, y ) <= d( s, u ) and therefore d[y] <= d[u]. When the graph has negative weights, this inequality no longer holds ( d[y] could be > d[u] if the weight of p( y to u ) is negative ).
Intuitively, let d[v] be a finalized shortest weight path from s to v and let u not be a member of S at that iteration. Then we know that d[v] does not include a path from s to u. In a following iteration, d[u] is finalized. If ( u, v ) exists and d[u] + w( u, v ) < d[v] then contradiction because there is a d( s, v ) < d[v].
Here is what Dijkstra does: It finalizes d(a,a)=0, then in the next iteration
finalizes d(a,b)=3. Then in the next iteration finalizes d(a,c)=8. Dijkstra
does not check the (c,b) edge because it does not update d(s,b) since d(s,b)
has already been finalized.

Tutorial Question 5
5. Use Prim's algorithm to find a minimum spanning tree in the following
graph (see tutorial).
PrimĻs algorithm is a special case of the generic minimum-spanning-tree algorithm. PrimĻs algorithm has the property that the edges of the set A always form a single tree.
MST-Prim( G = (V, E), w, r )
- key field specifies the vertices not in tree priority in Q.
1. Q = V
2. for each u in Q do key[u] = infinity // no edge connecting u to the tree
3. key[r] = 0
4. pi[r] = nil
5. while Q not empty do
6. u = EXTRACT_MIN( Q )
7. for each v in Adj(u), (u,v) do
8. if v in Q and w(u,v) < key(v) then
9. pi[v] = u
10. key[v] = w(u,v)
- key[v] is the minimum weight of any edge connecting v to a vertex in the tree.
- pi[v] is parent of v in the tree.
CLR Excercise 25.2-1
25.2-1
Run DijkstraĻs algorithm on the directed graph of figure 25.2 (Cormen), first using vertex s as the source and then using vertex y as the source. In the style of Figure 25.5, show the d and pi ( parent ) values and the vertices in set S after each iteration of the while loop.
Follow the same method as detailed in tutorial question 2, but add a parent field to the table. The parent field is equal to vertex u when d( s, v ) path = < s, v1, v2,... u, v > or is equal to null if the path = < s, v >. To do this in the same form as Figure 25.5, simply write the table values in their appropriate locations on the graph.
CLR Excercise 25.2-3
25.2-3 Suppose we change line 4 of DijkstraĻs algorithm to the following.
4: while |Q| > 1
This change cause the while loop to execute |V| - 1 times instead of |V| times. Is this proposed algorithm correct?
Yes. Consider the following figure. At each iteration, one vertex is added to S. So, after |V| - 1 iterations, |S| = |V| - 1. Let u be the one vertex not in S. Let x be any vertex to which u is adjacent to. A shortest weight path from s to u can be decomposed into a path from s to x and an edge from x to u. Note that x could be s, and therefore the path from s to u would be the edge from s to u. All paths from s to x are contained within S, because for the d[x] to be finalized, it must be based on other finalized d[v]Ļs. At the last iteration, the predicted d( s, u ) is the minimum weight of all possible paths s to u. Because d[v] has been finalized for all vertices v except u, the predicted value is the final value. There is no non-finalized d[v] that could contribute to a lower d( s, u ) than the d( s, u ) predicted at the |V| - 1th iteration. So, d( s, u ) at the |V| - 1ith iteration is in fact the final d( s, u ). The only thing to remember, is not to use S as the set of all vertices with d(v), must use V, otherwise would not include vertex u.